
FORWARD AND INVERSE PROBLEMS OF THIN PLATE MECHANICS BASED ON PHYSICS-INFORMED DEEP TRANSFER LEARNING FOR
-
摘要: 随着计算机技术的快速发展,深度学习在工程领域的应用越来越广泛。在实际应用中,用于训练的数据集往往具有“小样本”、“高维度”、“稀疏”等特征,这导致传统深度学习模型的适用范围十分有限。该文建立了一种基于迁移学习增强的物理信息神经网络模型,用于解决数据稀疏的力学正、反问题。结合迁移学习策略,利用源模型中已有知识来加强目标任务中的学习,从而提高学习的效率,实现不需要大量数据就能得到较好预测性能的目标。该方法在薄板(两端简支+两端固支)的数据集上训练源模型,基于深度迁移学习从源模型上提取神经网络特征;利用目标任务中稀疏数据集实现源模型的微调,进而对不同边界的薄板响应预测(正问题)和边界识别(反问题)的目标任务进行验证。研究结果表明,该方法在小样本的目标任务上具有良好的精度和泛化能力。相比数据驱动的深度学习模型,物理信息神经网络模型可以有效避免数据生成带来的成本和网格独立性等问题。Abstract: Deep learning has become increasingly popular in the engineering profession as computer technology has advanced. However, the data set used for training frequently has the characteristics of a small sample set, of a high dimension and sparse in practical application, limiting the application breadth of standard deep learning models. In this study, a transfer learning enhanced physics-informed neural network is developed to solve the forward and inverse mechanics problems with the sparse data set. The physics-informed model, when used in conjunction with the transfer learning method, improves learning efficiency and maintains predictability in the target task by using existing information from the source model without requiring a large amount of data. The method starts by using a data set to train the source model of a thin plate (simple support at both ends and fixed support at both ends). The features of neural network are retrieved from the source model based on deep transfer learning. The source model is fine-tuned by using the sparse data set in the target task. The target task of response prediction (forward problem) and boundary recognition (inverse problem) in the thin plates with different boundaries are verified. The results show that the method has high accuracy and generalization ability for the target task with a small sample set. Compared with the single data-driven deep learning method, the physics-informed deep transfer learning has the advantage of avoiding the cost and grid independence caused by data generation.
-
力学正反问题普遍存在于各类工程问题中,其求解方法一直为学术及工程界所关注。正问题是指已知受力状态、边界等条件来求解其力学响应;反问题是某些边界条件或者参数未知,通过获取力学物理信息来反向推演相关未知参数[1-2]。
随着计算机技术的快速发展,深度学习在固体力学问题中的应用越来越广泛。江守燕等[3]基于数据驱动的神经网络实现大体积混凝土结构中缝深的无损检测,通过考察波经过带缝结构传播的信号进而预测裂缝深度。韩小雷等[4]基于RC梁低周往复试验数据,对模型本构骨架参数和滞回参数进行辨识,并建立塑性铰RC梁构件参数深度学习预测模型。赵林鑫等[5]基于机器学习的缺陷反演模型,建立薄板的结构动力响应和缺陷参数的映射关系,用于预测薄板结构的缺陷位置和大小信息。
物理信息神经网络是一类将物理信息(边界条件、初始条件和物理方程等)嵌入到网络结构中的深度学习模型。该模型最大的特点是在对训练数据的处理中利用了物理信息先验知识,进而使得模型具有更好的可解释性和扩展性。物理信息的存在不仅减轻了模型对大量训练数据的依赖性,同时也为模型提供了物理约束,进而提高预测精度。RAISSI等[6]提出物理信息神经网络(Physics-informed Neural Network, PINN)以实现常微分方程和偏微分方程系统问题的求解和参数的识别。SUN等[7]提出了一种不使用任何标记数的流体模拟代理模型,并通过最小化流体质量和动量守恒定律损失函数来训练该模型。研究表明该模型能很好地定义和解决偏微分方程。MAO等[8]基于PINN来模拟高速气动流动的欧拉方程,其结果表明PINN在传统方法难以解决的反问题上更具有优越性。SHUKLA等[9]基于PINN实现了金属板中表面裂纹的识别和表征问题的求解。侯龙锋等[10]基于PINN构建了低雷诺数下的槽道流数值模型,并对槽道流的流动参数进行预测,验证该方法具有较高的模拟精度。陆至彬等[11]以具有内热源的二维稳态导热方程和平板间二维稳态对流传热方程为案例,基于软边界和硬边界两种设定方法构建PINN,验证代理模型的可信度较高。在PINN的基础上,国内外学者相继提出了不同的改进模型,典型的有守恒型PINN(cPINN)、变分型PINNs(vPINNs)等。PINN也因此在流体力学、材料力学等领域得到了广泛的应用[12-13]。KARNIADAKIS等[14]研究表明PINN模型适用于各类基础科学学科。
尽管如此,基于PINN方法实现工程结构设计优化过程中物理场的快速仿真(正问题)与精确反演(反问题)仍是一项具有挑战性的任务,其主要原因是关于复杂结构系统的有效实验数据数量十分有限。迁移学习是深度学习中的一项重要技术,其通过将源域任务的特征知识迁移至目标域任务,从而使目标域任务具有更高的效率和精度。该方法可用于解决小数据问题(源域中有足够的标记数据,而目标域中只有少量标记数据的情况)和增强神经网络的鲁棒性[15-16]。CHAKRABORTY[17]基于迁移学习和物理-数据驱动的深度学习技术,成功将求解低保真度问题所获得的特征知识转移并用于求解高保真度问题。HAGHIGHA等[18]基于有限元模型划分稀疏网格生成小数据集,通过再次训练预训练网络模型实现数据解和参数的快速收敛,验证了迁移学习在物理信息神经网络框架中的适用性,并发现在网络再培训过程中大大加快了收敛速度。GAO等[19]基于神经网络的迁移学习,利用相对较少的图像标记建立起结构损伤识别方法,实现包括结构部件类型确认、剥落状态检查、损伤等级评估和损伤类型的判定。
本文基于网络迁移学习策略,建立了一种基于迁移学习增强的物理驱动神经网络模型来求解矩形薄板力学正反问题。首先以深度神经网络为基础,将对应的边界条件、初始条件和控制方程等嵌入网络结构中,建立物理信息深度神经网络;其次使用源域的样本对设计好的神经网络进行预训练,保存预先训练好的网络模型;然后基于迁移学习策略,调用预训练模型及参数(权重和偏差),冻结部分网络层及参数,以保留在源域模型中的特征知识;最后通过目标域中小样本集重新训练模型,实现目标任务的求解。深度迁移学习使得模型训练更加高效,且可有效避免小样本训练过程中网络过度拟合。通过不同边界矩形薄板力学正反问题的求解,表明该方法具有良好的适应性和鲁棒性。
1 物理信息神经网络
1.1 神经网络框架
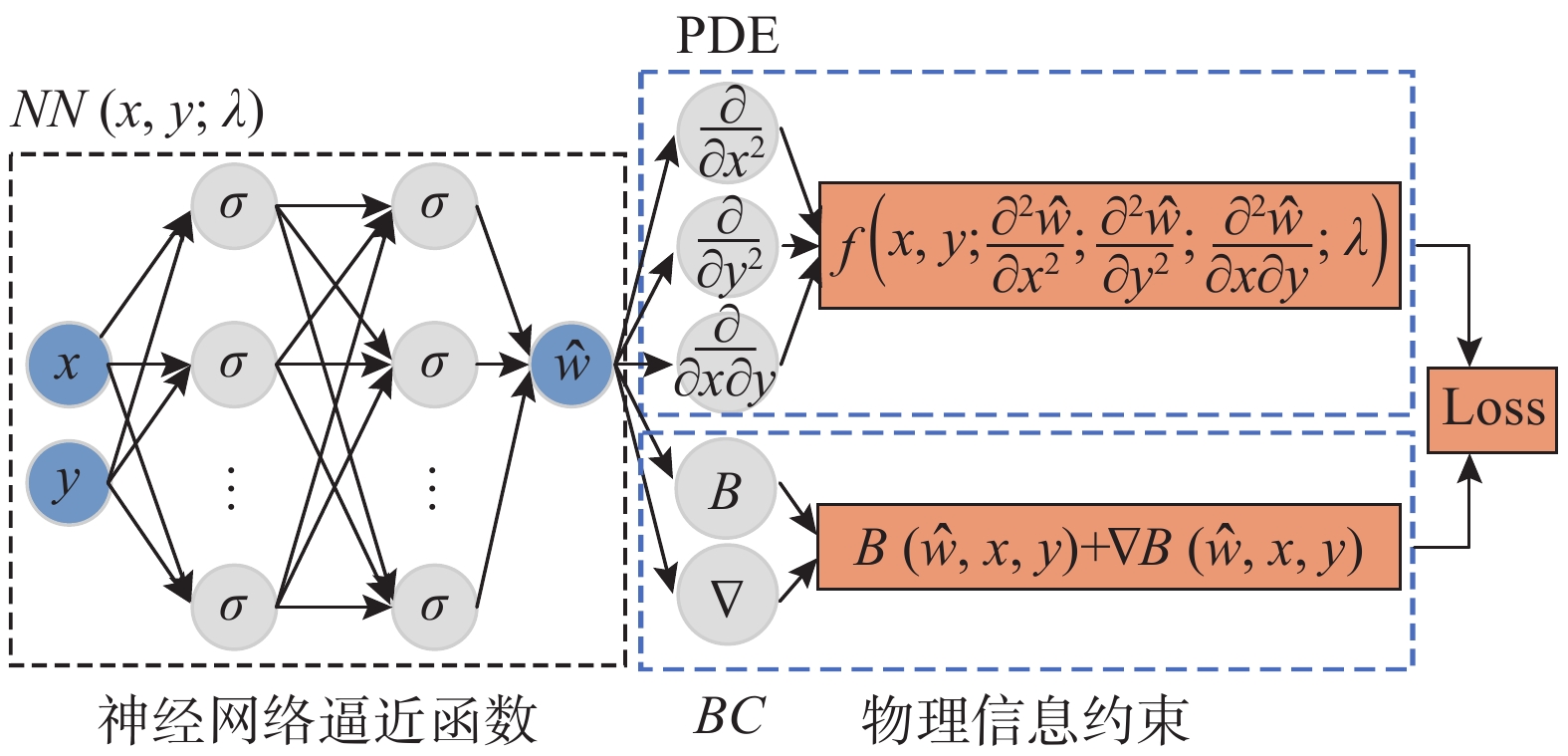
物理信息神经网络的基本框架包括神经网络逼近函数和物理信息约束两个部分(图1)。输入数据通过全连接神经网络逼近函数获得预测值。利用自动微分算法获取预测结果的物理信息残差,将其作为正则项约束放入损失函数中,利用梯度下降算法训练神经网络连接权重参数和偏差向量,直到残差达到收敛条件停止训练,进而实现对模型参数的求解和结果的预测。
如图1所示,该模型是一个Rdin→Rdout的 L层神经网络,由输入层、隐藏层和输出层组成。第一层为输入层,输入训练数据如式(1)所示;隐藏层的第L层有N个神经元,第L层权重矩阵和偏差向量是wI∈RNT×NT−1和bI∈RNT,损失值通过前反馈算法进行传递,每一层通过式(2)为下一层创建数据;输出层为全连接层,通过式(3)生成预测结果:
N0(x)=x=(x1,x2,⋯,xd)∈Rdin (1) Nl(x)=σ(wlNl−1(x) + bl),l=1,2,⋯,L−1 (2) Nl(x)=WLNL−1(x) + bL∈Rdout (3) 隐藏层中激活函数采用双曲正切函数,如式(4)所示:
tanh(x)=ex−e−xex+e−x (4) 对于所求解的偏微分方程(式(5)),需要考虑参数λ和u(x)的共同影响:
f(x;∂u∂x1,∂u∂x2,⋯,∂u∂xd;∂2u∂x1∂x1,∂2u∂x2∂x2,⋯,∂2u∂x1∂xd;⋯;λ)=0 (5) 对于不同的力学偏微分方程问题,其对应的解应满足边界条件,如式(6)所示:
B(u,x)=0,u∈∂Ω,x∈∂Ω (6) 对于非线性偏微分方程,利用PINN所预测的结果应满足下式:
u(x,y)+N(u,λ)=0,x∈Ω,y∈Ω (7) 式中:u(x, y)为偏微分方程的解;N(•, λ)为参数λ的非线性微分算子;Ω为欧式空间RD的子集;x和y为空间变量。
1.2 损失函数
传统物理模型是通过给定任意点(x, y)的初始状态、边界状态和物理参数λ来求解偏微分方程。在无法获得解析解时,通常采用有限差分、有限体积等数值方法进行求解。PINN以深度神经网络为基础,将物理信息嵌入到网络框架中,进而建立物理信息神经网络来逼近u(x, y)。其中,模型残差包含两部分:预测结果的残差(式(8))和物理信息约束的残差(式(9)):
Lossu=1NNu∑i=1|uN(xiu,yiu)−ui|2 (8) Lossr=Nr∑i=1|r(xir,yir)|2 (9) 式中:uN(x, y)为神经网络的逼近函数;(xiu,yiu)Nui=1为通过初始状态和边界状态获取的训练数据;r(x,y)=uNt+N(uN,λ)为物理信息约束的残差。
因此, PINN 的损失函数可表示为:
Loss=Lossu+Lossr (10) 基于 PINN 求解力学正反问题的过程如下:
1)使用参数λ构造神经网络参数;
2)通过边界条件和初始条件建立损失函数;
3)通过对偏微分方程和边界条件残差求和,确定损失值;
4)通过最小化损失函数L(x; λ)求解ˆu(x,y)和λ*。
2 迁移学习
2.1 迁移学习分类
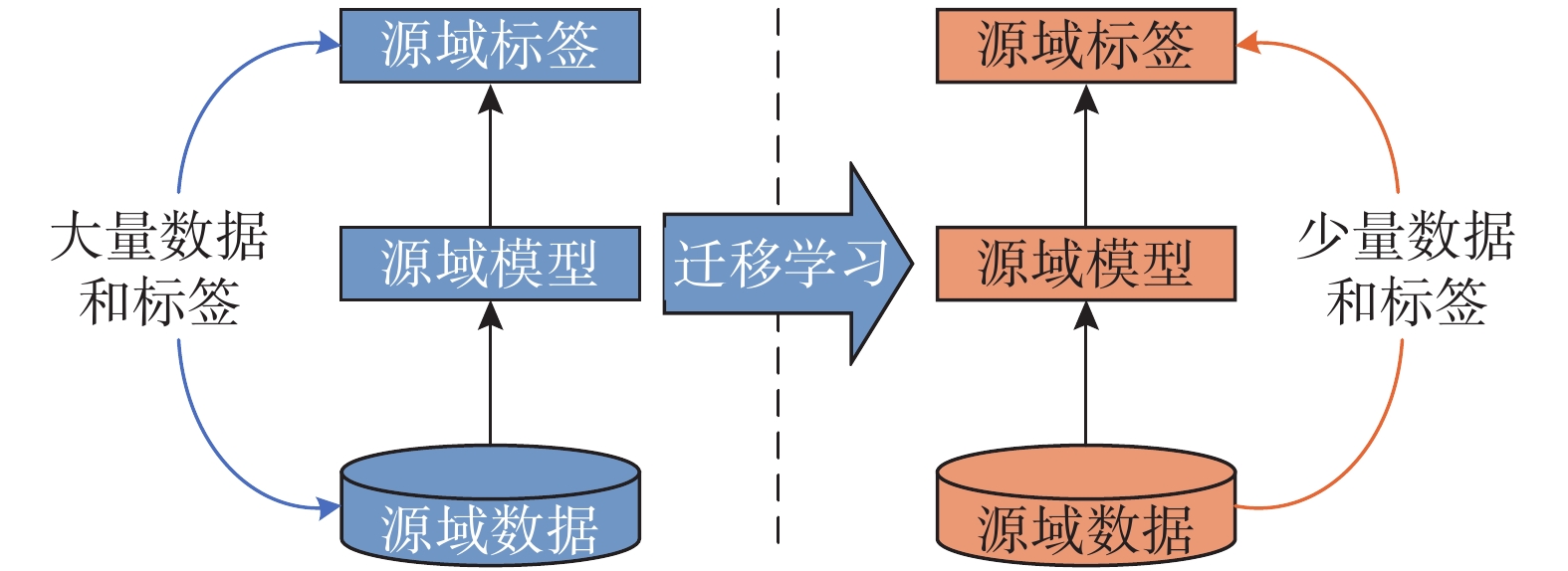
在传统机器学习场景中,对于两个相关领域,通常需要两个标记数据集来分别训练两个模型。该方法忽略了领域之间的相似性,导致计算效率较低。工程领域中的标记数据具有样本小、维度高、稀疏等特征,易导致传统机器学习模型过度拟合,且泛化能力较差、适用范围有限。通过迁移学习,将一个领域已存“知识”运用到一个新的相关领域,对不同但相关领域问题进行求解,放宽了传统机器学习必须具有足够的训练样本才能得到一个好的训练模型的限制[20-21]。迁移学习的实现过程如图2所示,首先利用大量的标记数据训练源域模型,将训练源域模型获得的特征知识迁移至目标域模型中,使用少量的标记数据对目标域进行训练,从而避免了获取大量数据的成本。
根据源域和目标域之间的相关性,迁移学习方法可分为四类[22]:基于实例迁移、基于特征迁移、基于模型(参数)迁移和基于关系迁移。其中基于实例迁移是根据一定的权重生成规则,对数据样本重用进行迁移学习。基于特征迁移是通过特征变换的方式互相迁移[23]。基于模型迁移是在源域和目标域中寻找共享的模型信息,从而实现模型的迁移。基本模型迁移的基本条件为:源域任务中的数据与目标域任务中的数据可以共享部分模型的参数[24]。基于关系迁移是关注源域和目标域的样本之间的关系,借助于马尔科夫逻辑网络来挖掘不同领域之间的关系相似性[25]。
2.2 迁移学习增强的神经网络
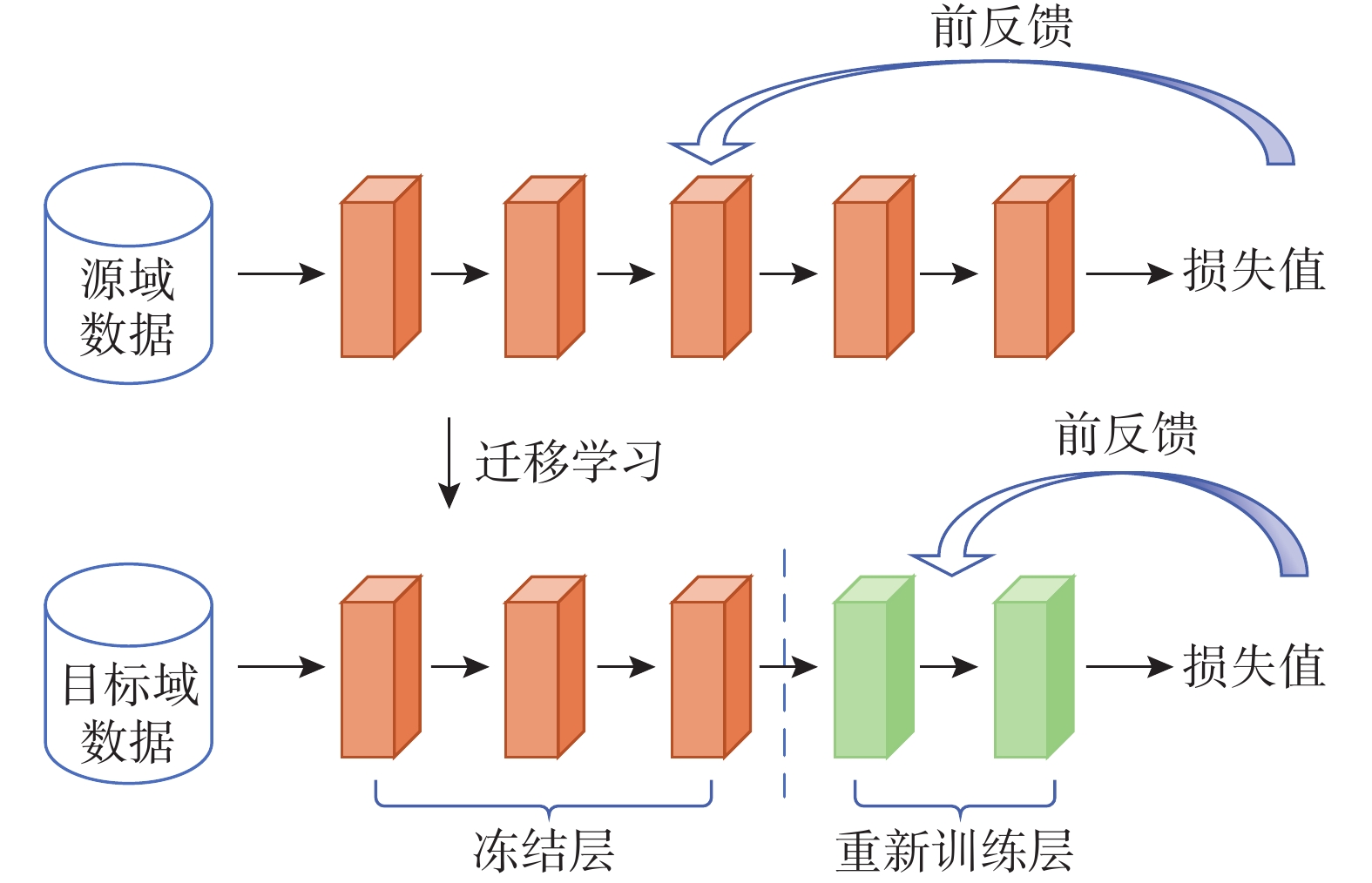
本文采用基于模型参数的迁移学习策略,其实现过程如图3所示。该方法在较低层次的网络中,提取普适和共性的特征,这些特征具有高度的可迁移性[26-27]。在较高的层次中,模型特征往往具有高度特性,因此需要学习更具体的高级特征。为实现模型层面的自适应,首先利用源域数据训练模型得到原有模型的结构,在源域数据训练的模型基础之上,冻结特征提取的网络层,选择较低层次网络的参数进行保留。利用目标域数据对原有模型进行微调更新,实现释放层的重新训练,在目标域中学习新行为样本的特征,进而获得解决目标域问题的模型。
基于迁移学习的求解过程如下:
1)准备源域数据和目标域数据;
2)利用源域数据训练获得源域模型;
3)提取源域模型的神经网络层参数,冻结源域模型的参数,释放全连接层并修改输出类别;
4)利用目标域样本数据更新释放层参数,用于解决目标域问题。
![]() 图 3 迁移学习增强的神经网络示意图Figure 3. The schematic diagram of physical-informed neural network enhanced by transfer learning
图 3 迁移学习增强的神经网络示意图Figure 3. The schematic diagram of physical-informed neural network enhanced by transfer learning3 基于深度迁移学习求解矩形薄板力学正反问题
通过PINN解决工程领域的力学问题的一个主要瓶颈在于需要为不同的问题采集大量的数据,训练成本巨大。为了解决这个问题,本文提出迁移学习增强的PINN。首先,冻结源域问题的前L-1层网络结构,保留其参数和权重,释放第L层的参数进行训练。其次,第L层训练得到的预测结果,计算其物理信息,将模型数据驱动的损失值和物理信息的损失值求和得到总的损失值。最后,将损失值进行反向传播继续训练释放层的参数,直至模型精度达到要求。以两边简支两边固支的物理信息神经网络为源域模型,采用迁移学习的方法对四边简支、四边固支的目标域问题进行求解。其中,薄板的挠度预测为力学正问题,对于边界的识别为力学反问题。
3.1 力学正问题
基于弹性薄板理论建立矩形薄板弯曲基本方程[28],如下:
∂4w∂x4+2∂4w∂x2∂y2+∂4w∂y4=qD (11) D=Eδ312(1−ν2) (12) 式中:w为薄板挠度;q为薄板上均布荷载大小;D为薄板抗弯刚度;E为薄板弹性模量;δ为薄板厚度;ν为薄板泊松比。
矩形薄板各点的本构关系如式(13)所示:
εx=−∂2w∂x2z,εy=−∂2w∂y2z,γxy=−2∂2w∂x∂yz,σx=E1−ν2(εx+νεy),σy=E1−ν2(εy+νεx), τxy=E2(1+ν)γxy (13) 力学正问题的研究是通过已知参数和相应边界条件求解结构的力学响应。本文将应力-应变本构关系引入到损失函数中,基于PINN求解矩形薄板力学正问题,网络模型的输出值为矩形薄板各点挠度大小。结合薄板弯曲基本方程式(11),基于数据驱动部分的损失函数为Lossu,如式(14)所示:
Lossu=‖ (14) 式中:w*为矩形薄板挠度的精确值;w为矩形薄板挠度的预测值。
将弯曲产生的应力作为力学正问题的物理信息,基于物理信息部分的损失函数如式(15)所示:
\begin{split} {{\rm{Loss}}_{\rm{r}}} = &{\left\| {{\nabla ^2}{\nabla ^2}w - \frac{q}{D}} \right\|} + {\left\| {{\sigma _x} - \sigma _x^*} \right\|} + \\ & {\left\| {{\sigma _y} - \sigma _y^*} \right\|} + {\left\| {{\tau _{xy}} - \tau _{xy}^*} \right\|} \end{split} (15) 式中:\sigma _x^* 、\sigma _y^* 、\tau _{xy}^* 为矩形薄板应力分量的精确值;σx、σy、τxy为矩形薄板应力分量的预测值。
力学正问题的损失函数为预测结果的损失值Lossu和物理信息约束损失值Lossr之和,如式(16)所示:
{{\rm{Loss}}_{\rm{p}}} = {{\rm{Loss}}_{\rm{u}}} + {{\rm{Loss}}_{\rm{r}}} (16) 3.2 力学反问题
力学反问题是已知部分解的信息,来确定模型中部分未知参数,即对结构的未知参数进行识别。假设矩形薄板的力学反问题识别参数为λ,对未知参数的识别可以表示为下列最优化的问题:
\{ {{\lambda ^{(1)}}, {\lambda ^{(2)}}, \cdots ,{\lambda ^{(m)}}} \} = \arg \mathop {\min }\limits_{{\lambda ^{(1)}}, {\lambda ^{(2)}}, \cdots ,{\lambda ^{(m)}}} L( {u,\lambda } ) (17) 本文利用矩形薄板在均布荷载作用下若干点的挠度和已知的材料参数,识别薄板的四条边界条件。为了对边界进行有效的识别,引入四个参数α1、α2、α3、α4,分别代表矩形薄板四边支撑的边界条件,损失函数采用交叉熵损失函数,通过对四个未知参数的识别实现对矩形薄板边界条件的识别(式(18)):
{{\rm{Loss}}_{\rm{b}}} = \sum\limits_{i = 1}^4 {\sum\limits_{j = 1}^n { - {\alpha _i}{{ {\left\| {\frac{{\partial w}}{{\partial x}}} \right\|} }_{\partial \varOmega }}} } - \left( {1 - {\alpha _i}} \right) {\left\|\frac{{{\partial ^2}w}}{{\partial {x^2}}} + v\frac{{{\partial ^2}w}}{{\partial {y^2}}} \right\|}_{\partial \varOmega } (18) 式中:i为四个边界条件;j为训练边界上各点位移的样本数。
力学反问题的损失函数为偏微分方程表示的物理信息损失函数和边界条件识别的损失函数之和,如式(19)所示:
{{\rm{Loss}}_{\rm{n}}} = {{\rm{Loss}}_{\rm{p}}} + {{\rm{Loss}}_{\rm{b}}} (19) 4 算例分析
4.1 矩形薄板力学正问题
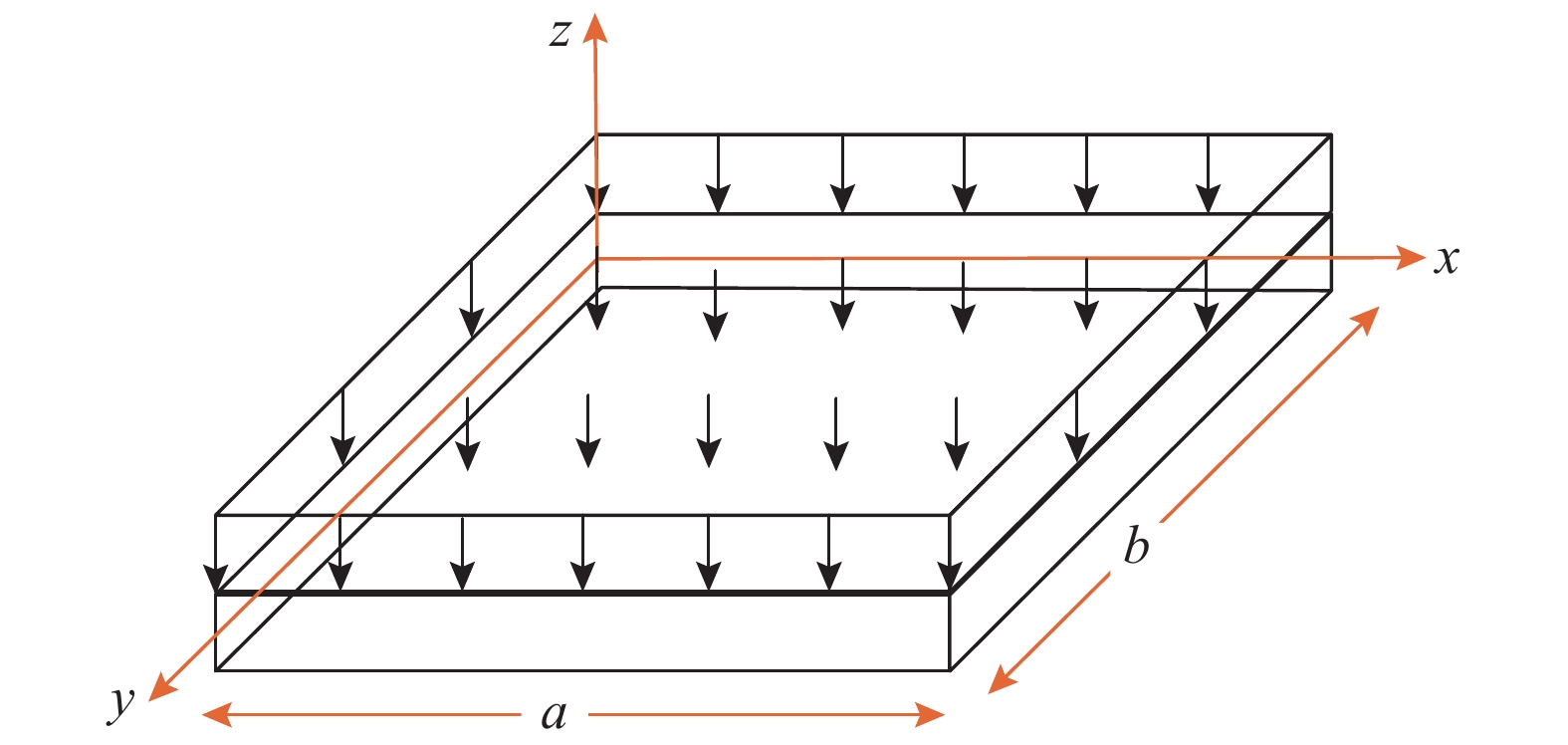
以矩形薄板在均布荷载q作用下的问题为例,选取材料参数:弹性模量E=1000 GPa、泊松比ν=0.25、均布荷载q=1 kPa、面板长度a=b=1 m,厚度取单位尺寸。x表示横轴,y表示纵轴,空间坐标系建立如图4所示。
![]() 图 4 矩形薄板受均布荷载作用示意图Figure 4. Schematic diagram of rectangular thin plate under uniformly distributed load
图 4 矩形薄板受均布荷载作用示意图Figure 4. Schematic diagram of rectangular thin plate under uniformly distributed load基于PINN求解矩形薄板的力学正问题,训练数据为20×20均匀划分薄板的挠度数据,神经网络一共四层隐藏层,每层隐藏层40个神经元,每批次训练样本大小为32,优化器采用Adam,学习率为0.001,迭代次数为1000次,求解力学正问题的网络结构如图5所示。
![]() 图 5 力学正问题的网络结构示意图Figure 5. The schematic diagram of the neural network for solving forward mechanics problems
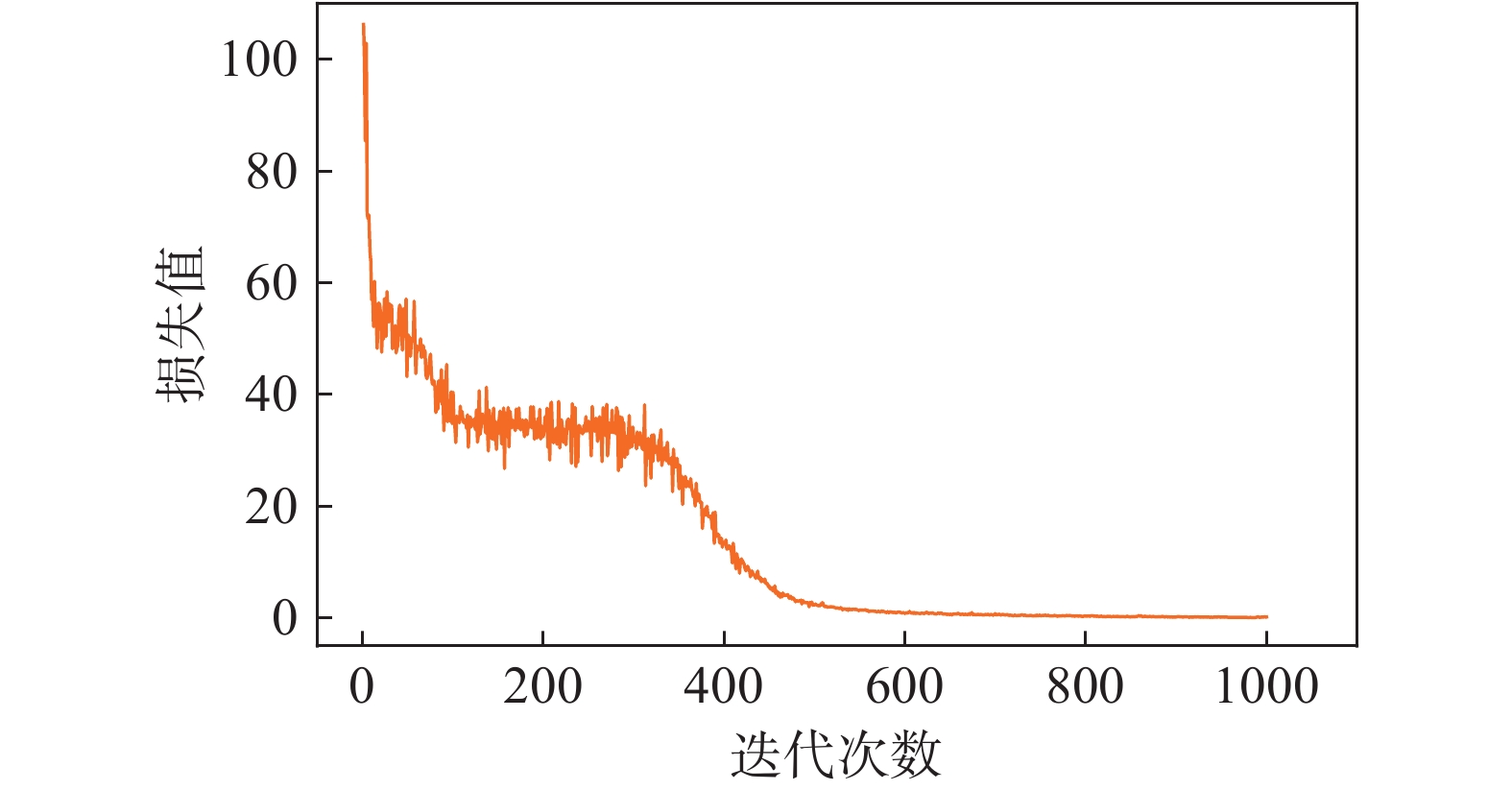
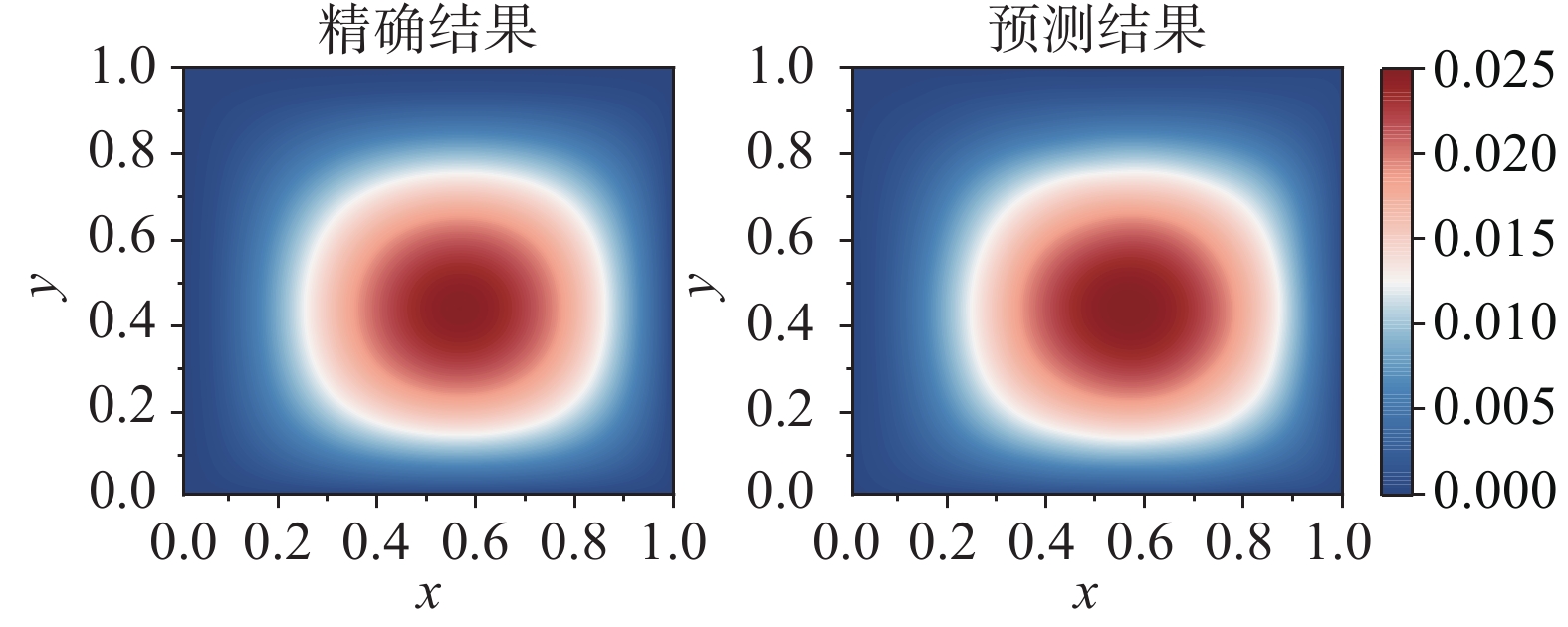
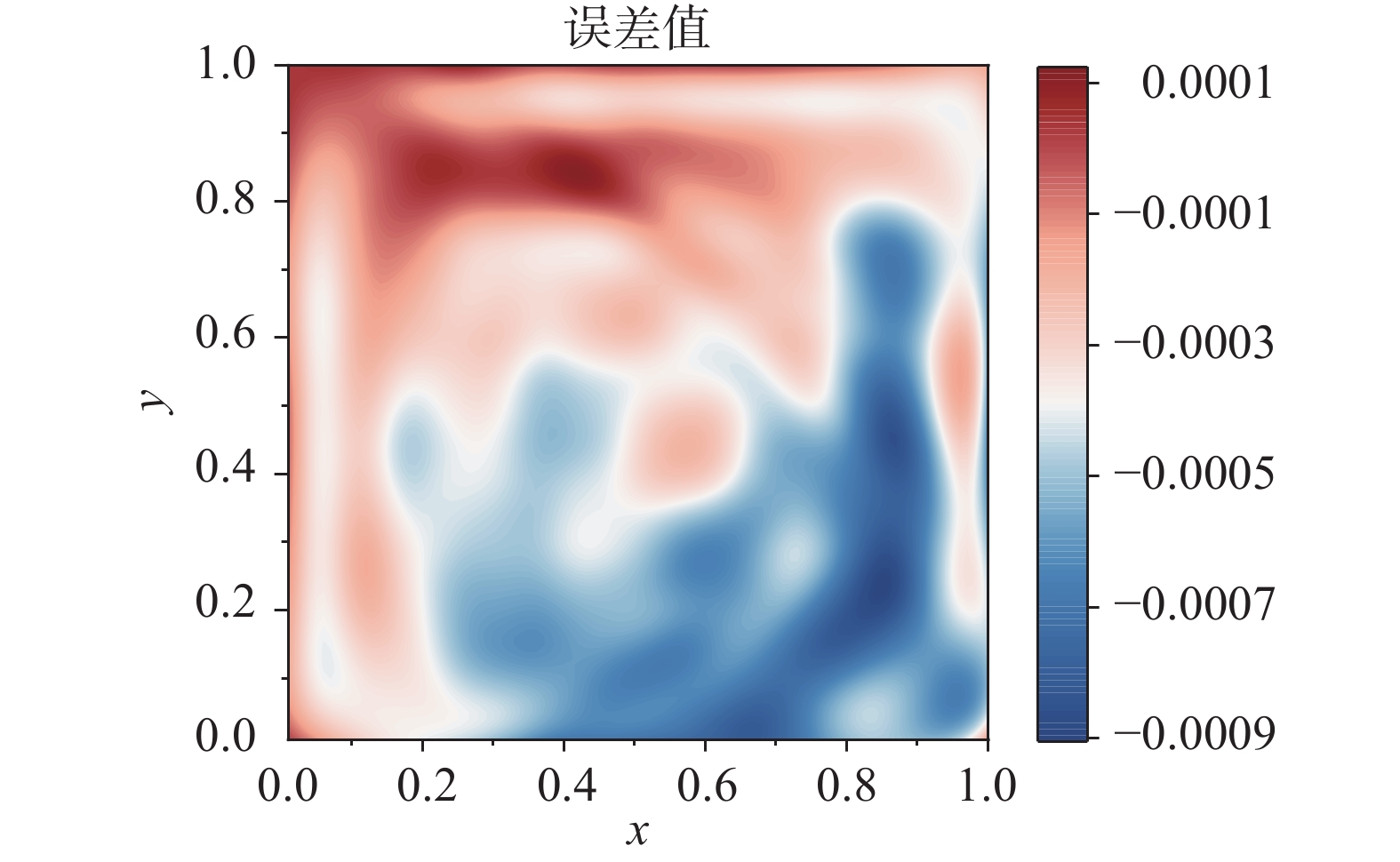
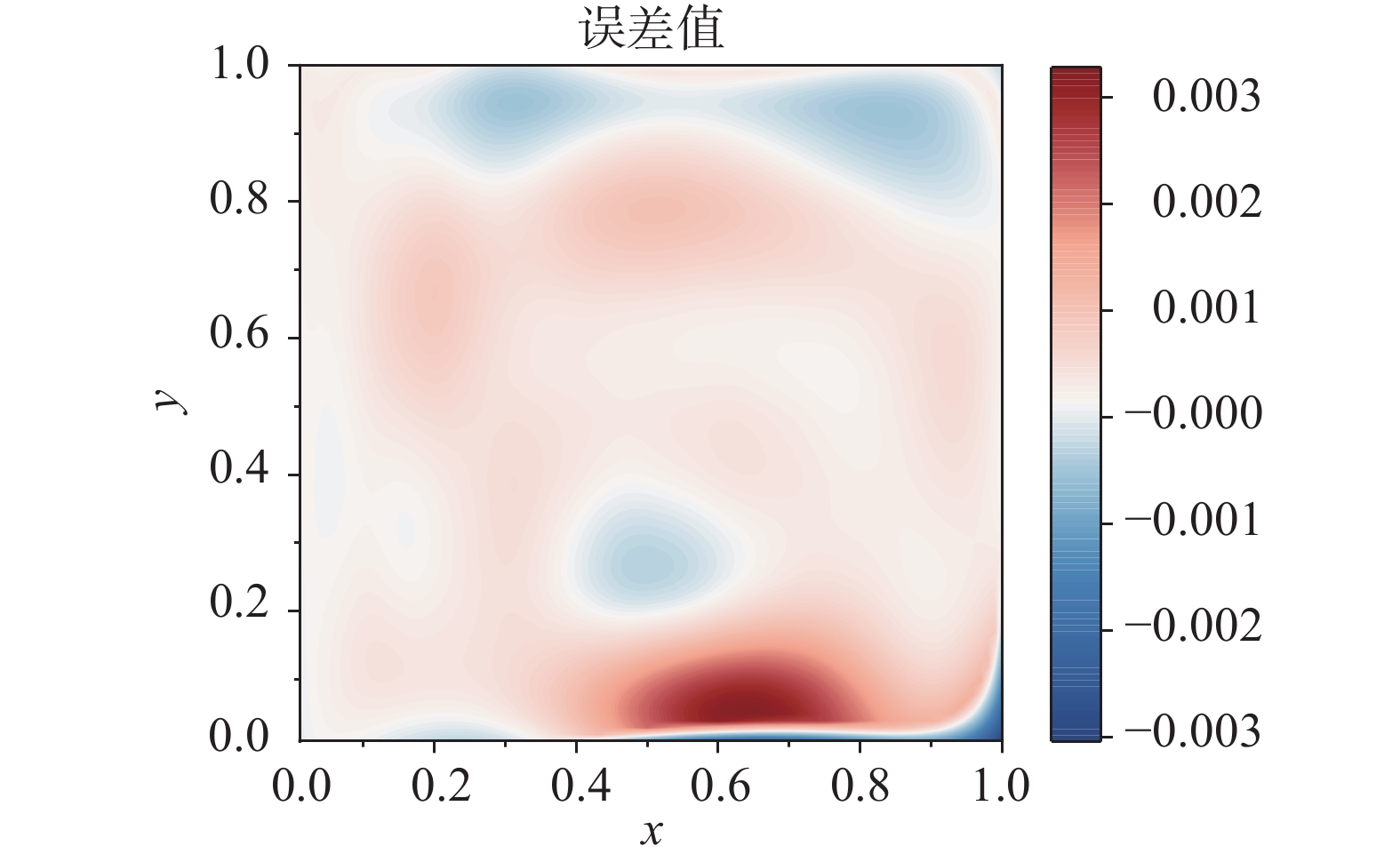
图 5 力学正问题的网络结构示意图Figure 5. The schematic diagram of the neural network for solving forward mechanics problems对于两边简支两边固支矩形薄板问题,利用20×20数据集进行模型训练,训练迭代过程如图6所示,其中模型在500代左右逐渐迭代收敛。矩形薄板的精确结果和预测结果如图7所示,预测结果的挠度分布规律与精确结果一致。精确结果和预测结果的误差值如图8所示,最大误差为0.08%,模型的预测精度较高。
![]() 图 6 迭代收敛曲线(两边简支+两边固支板)Figure 6. The curve of iterative convergence (Simply supported plates on both sides and fixed plates on both sides)
图 6 迭代收敛曲线(两边简支+两边固支板)Figure 6. The curve of iterative convergence (Simply supported plates on both sides and fixed plates on both sides)![]() 图 7 挠度预测值与精确值对比(两边简支+两边固支板)Figure 7. A comparison between the predicted value of deflection and its exact value (Simply supported plates on both sides and fixed plates on both sides)
图 7 挠度预测值与精确值对比(两边简支+两边固支板)Figure 7. A comparison between the predicted value of deflection and its exact value (Simply supported plates on both sides and fixed plates on both sides)![]() 图 8 误差分布(两边简支+两边固支板)Figure 8. The distribution of error (Simply supported plates on both sides and fixed plates on both sides)
图 8 误差分布(两边简支+两边固支板)Figure 8. The distribution of error (Simply supported plates on both sides and fixed plates on both sides)采用迁移学习方法求解矩形薄板的力学正问题,通过20×20的数据训练得到两边简支两边固支矩形薄板的模型(源任务),其网络结构共有四个隐藏层。四边简支和四边固支力学正问题(目标任务),训练数据为划分网格10×10点的挠度,数据量为源域模型的四分之一。源任务和目标任务的训练数据分布不同,训练数据集的规模不同,但两者的输出预测指标相同。采用模型迁移策略[26],冻结隐藏层之间的偏置和权重,释放最后一个网络层和全连接层参数,使用少量数据求解目标任务。
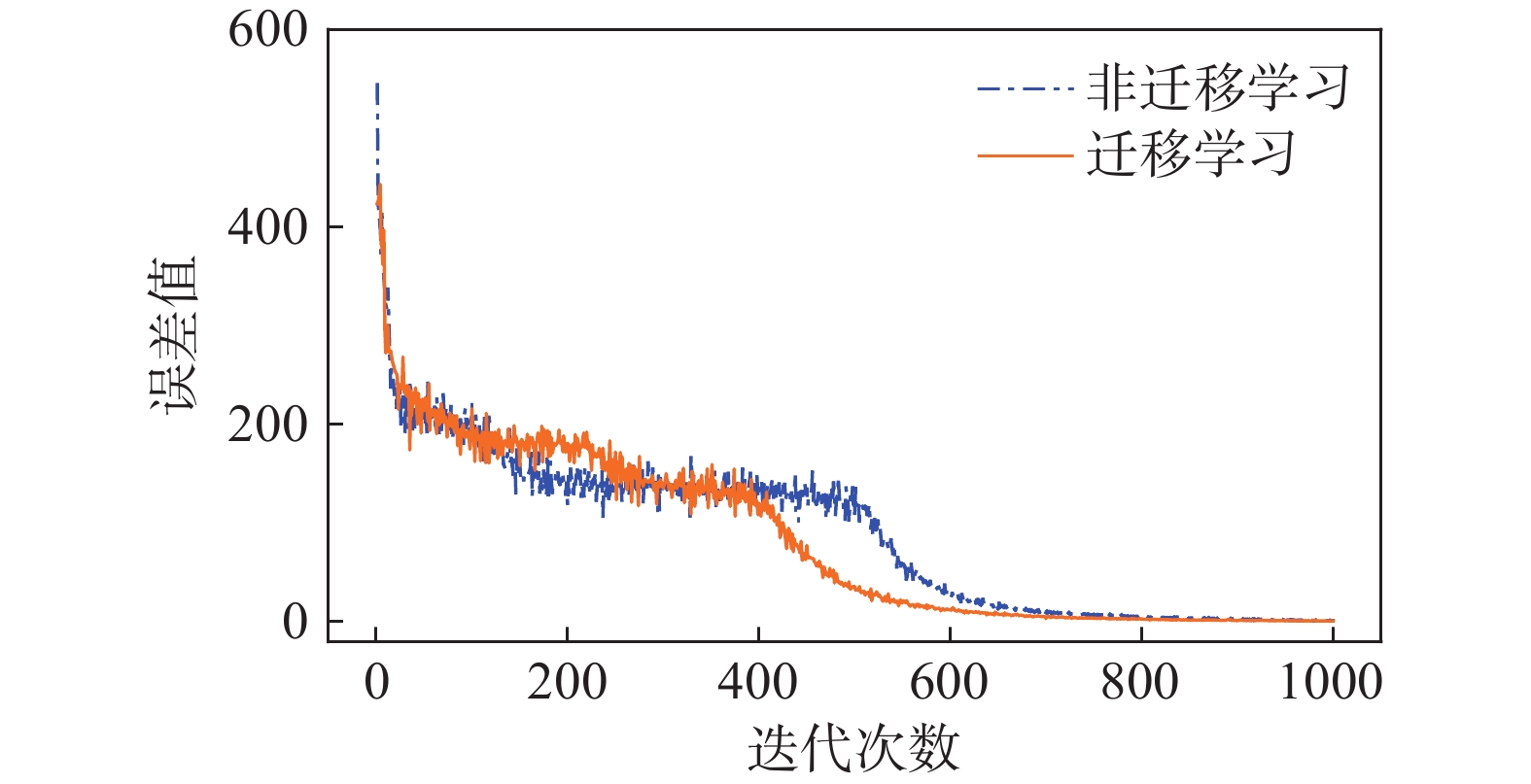
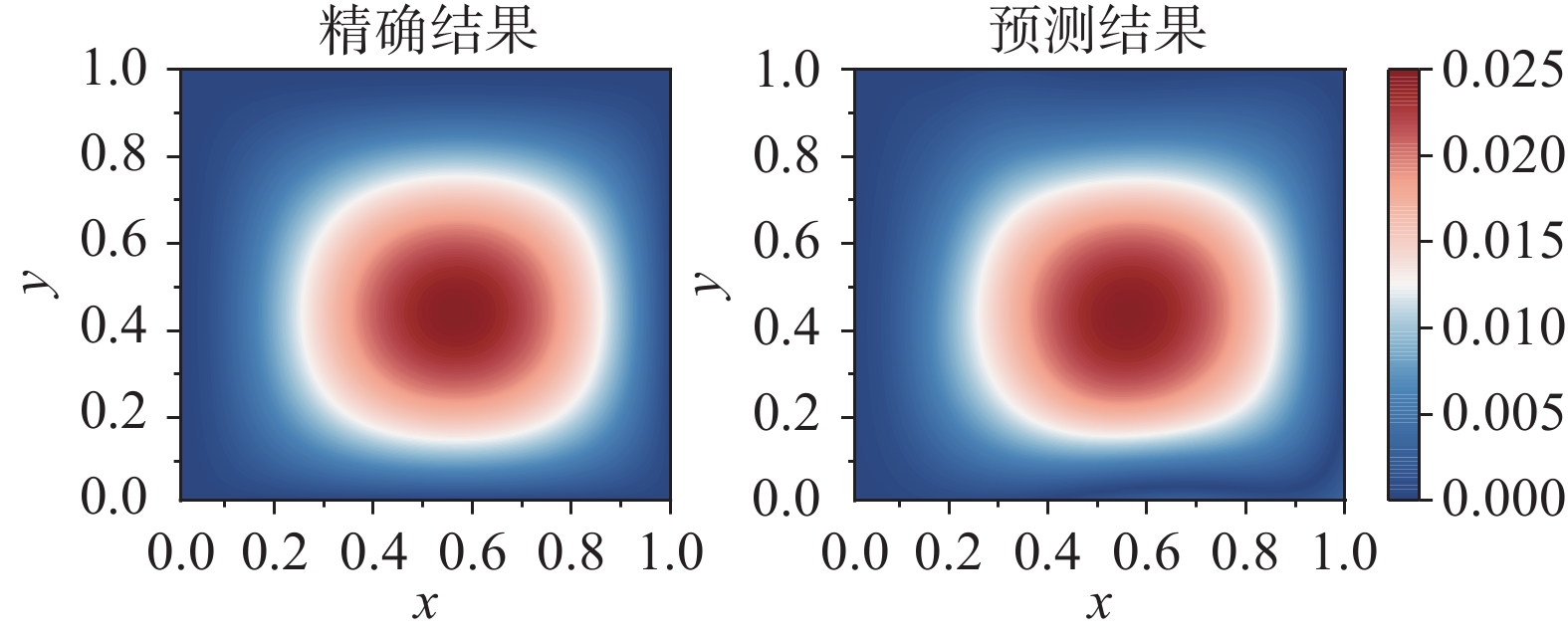
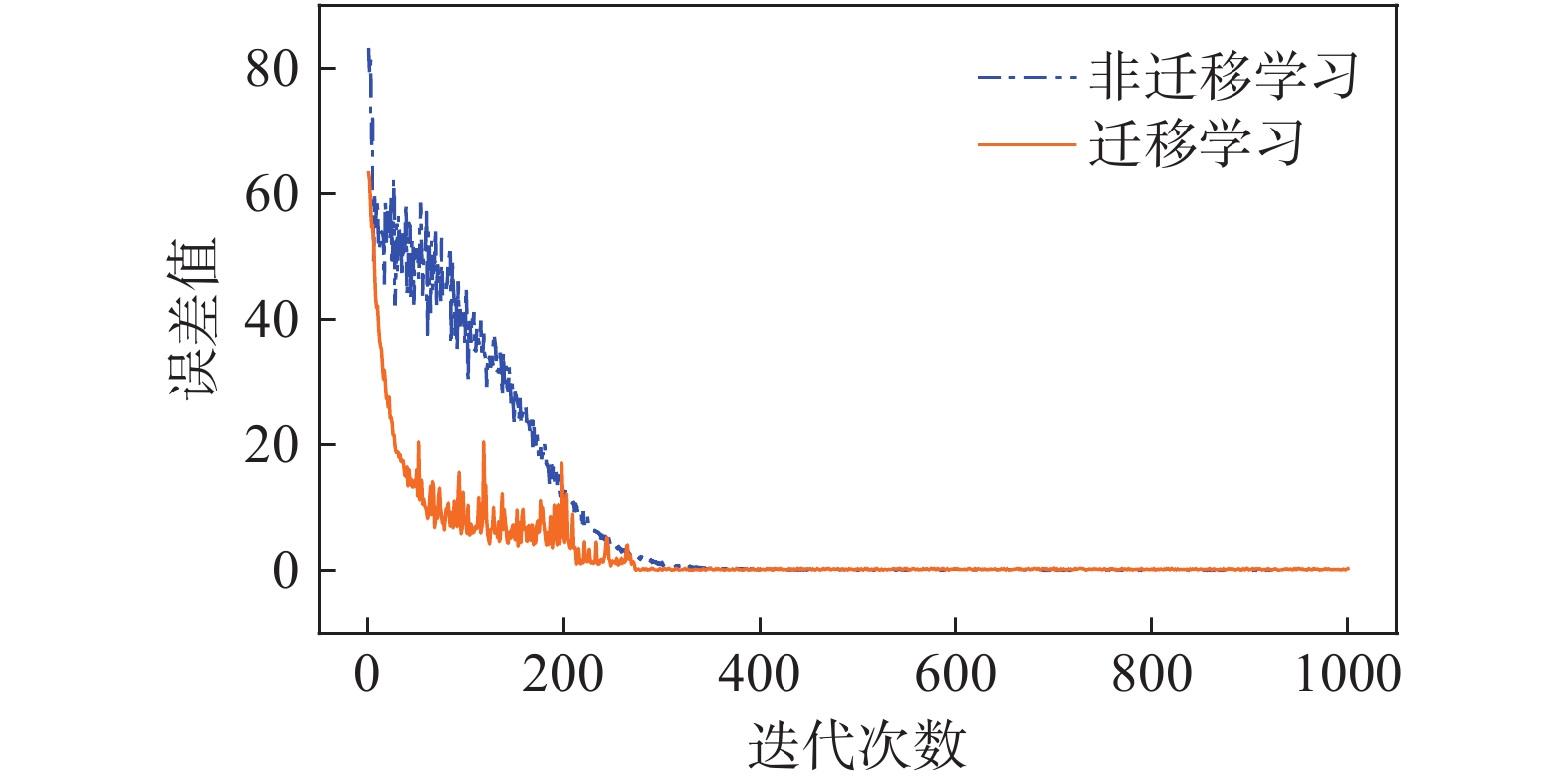
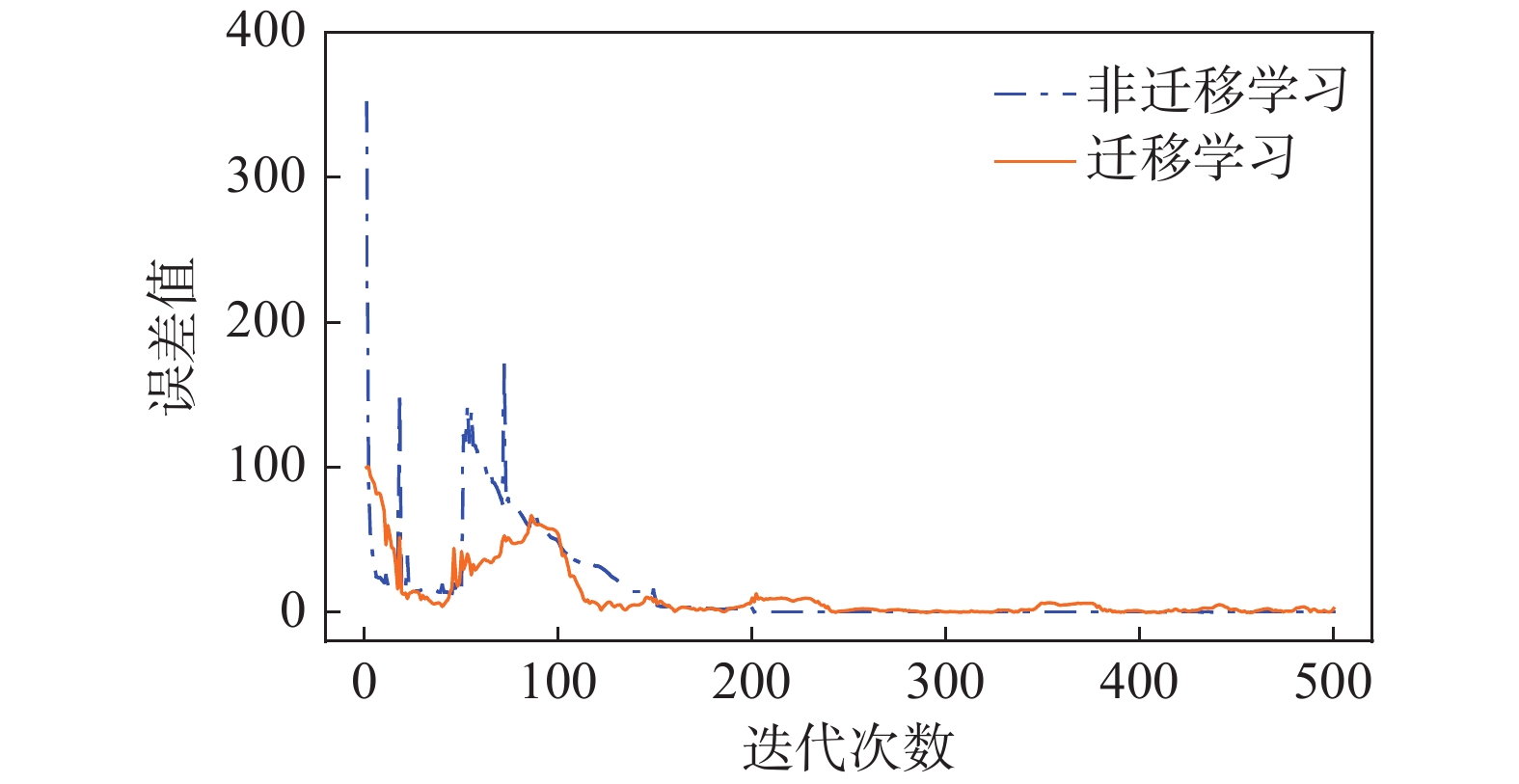
基于迁移学习模型求解四边简支问题的迭代收敛曲线如图9所示,迁移学习方法的初始损失值较小,模型的迭代收敛速度更快;薄板的挠度精确结果和预测结果如图10所示,挠度的分布规律基本一致;预测结果的损失值如图11所示,迁移学习训练输出的目标域模型误差为0.3%。
![]() 图 9 不同网络模型迭代收敛曲线(四边简支板)Figure 9. Iterative convergence curves of different network models (Simply supported plates on four sides)
图 9 不同网络模型迭代收敛曲线(四边简支板)Figure 9. Iterative convergence curves of different network models (Simply supported plates on four sides)![]() 图 10 挠度预测值与精确值对比(四边简支板)Figure 10. A comparison between the predicted value of deflection and its exact value (Simply s upported plates on four sides)
图 10 挠度预测值与精确值对比(四边简支板)Figure 10. A comparison between the predicted value of deflection and its exact value (Simply s upported plates on four sides)![]() 图 11 误差分布(四边简支)Figure 11. The distribution of error (Simply supported plates on four sides)
图 11 误差分布(四边简支)Figure 11. The distribution of error (Simply supported plates on four sides)基于迁移学习模型求解四边固支问题的迭代收敛曲线如图12所示,薄板的挠度预测如图13所示,薄板预测的损失值如图14所示。
![]() 图 12 不同网络模型迭代收敛曲线(四边固支板)Figure 12. Iterative convergence curves of different network models (Four sided fixed support plate)
图 12 不同网络模型迭代收敛曲线(四边固支板)Figure 12. Iterative convergence curves of different network models (Four sided fixed support plate)![]() 图 13 挠度预测值与精确值对比(四边固支板)Figure 13. A comparison between the predicted value of deflection and its exact value (Four sided fixed support plate)
图 13 挠度预测值与精确值对比(四边固支板)Figure 13. A comparison between the predicted value of deflection and its exact value (Four sided fixed support plate)经过收敛情况和计算结果的对比,可以看出基于迁移学习求解板的正问题,训练数据量为原来源域模型的四分之一,迭代的初始损失值较小,迭代收敛效果良好且模型预测精度不下降,这表明迁移学习方法对于解决小样本数据的矩形薄板力学正问题具有良好的精度和泛化能力。
![]() 图 14 误差分布(四边固支板)Figure 14. The distribution of error (Four sided fixed support plate)
图 14 误差分布(四边固支板)Figure 14. The distribution of error (Four sided fixed support plate)4.2 矩形薄板力学反问题
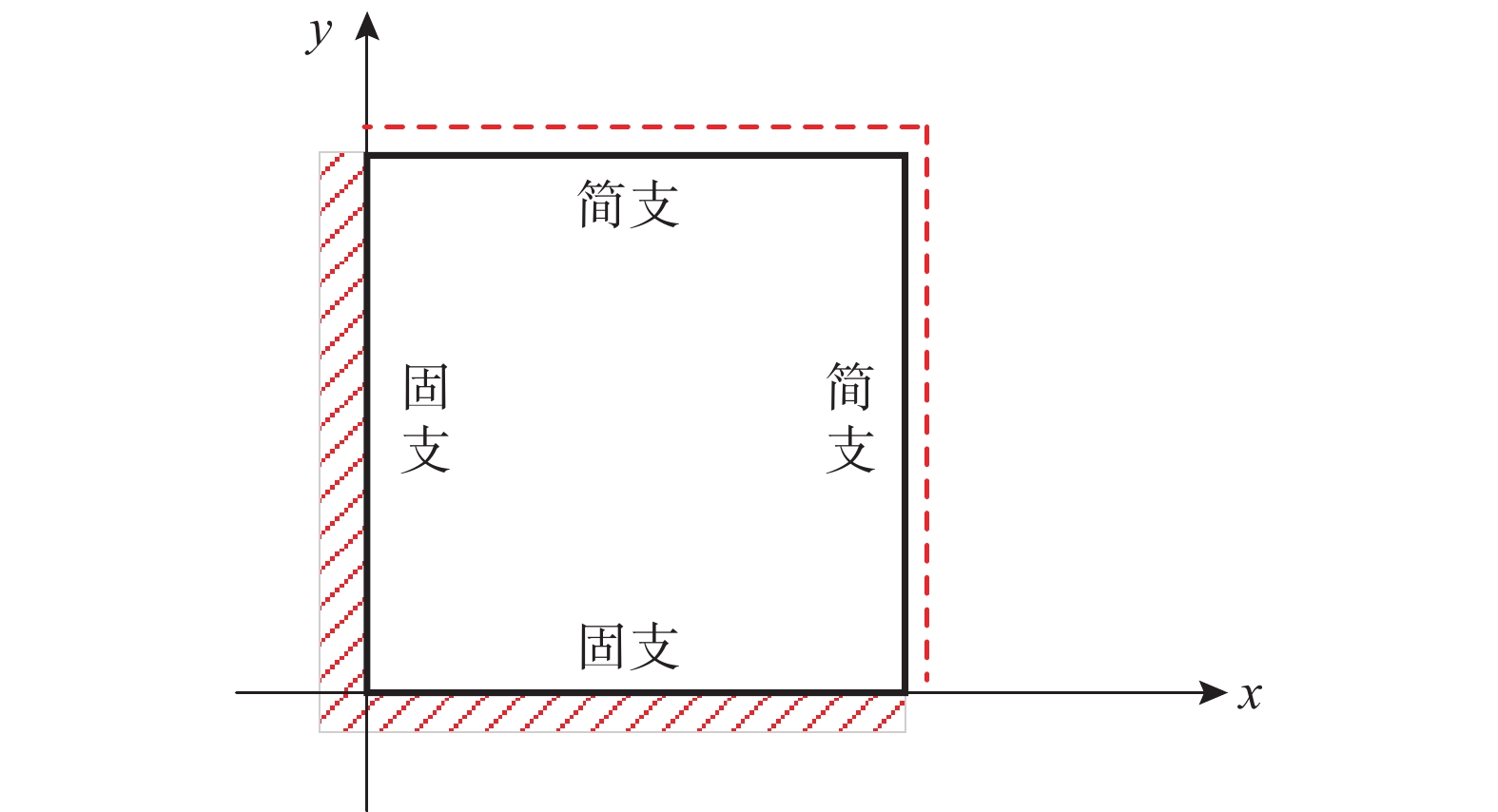
以受均布荷载作用的矩形薄板问题(两边简支+两边固支)为例(源任务),基本的物理参数与正问题的相同。考虑到反问题的边界条件和挠度分布等比较复杂,选择隐藏层为8层,每层40个节点的网络进行训练。固支边界理论值为0,简支边界理论值为1。取薄板固支边界为x=0、y=0,简支边界为x=a、y=b,设定四个边界参数的初始值均为0.5。边界条件示意图如图15所示。
![]() 图 15 两边简支两边固支薄板示意图Figure 15. The schematic diagram of simply supported plates with fixed supports on both sides
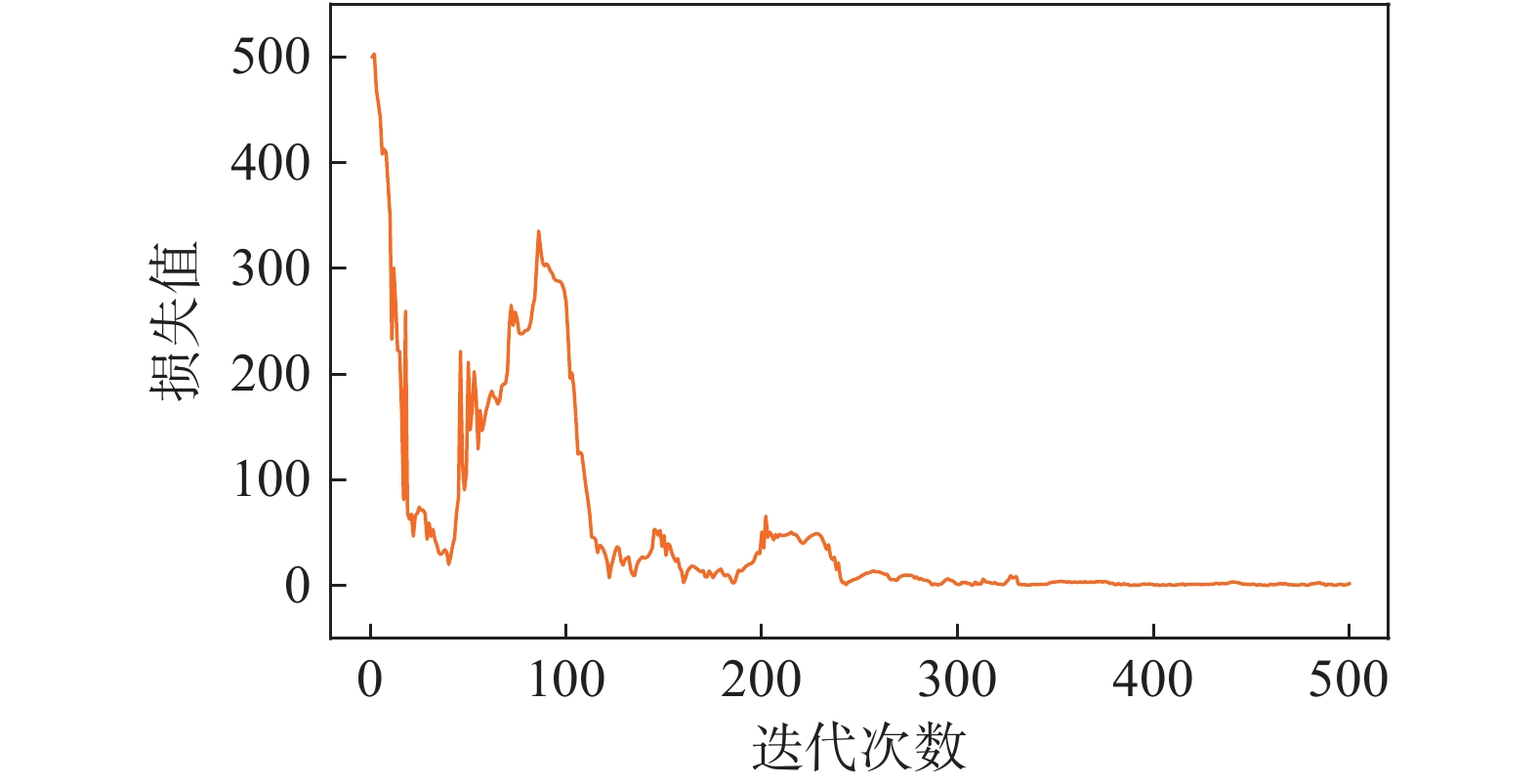
图 15 两边简支两边固支薄板示意图Figure 15. The schematic diagram of simply supported plates with fixed supports on both sides划分20×20的网格挠度数据训练并预测矩形薄板各点挠度和四条边界条件(源任务),模型的训练迭代过程如图16所示,该模型的迭代收敛速度较快,矩形薄板的边界参数识别结果如表1所示,边界识别结果较为准确。
四边简支和四边固支薄板的识别问题(目标任务),划分网格10×10。基于模型参数迁移的方法,释放源域模型的最后一个网络层和全连接层,对目标任务进行求解。对四边简支矩形薄板的四个边界参数进行初始化,其初始值均为0.5,利用10×10的数据训练并预测矩形薄板四条边界条件。四边简支板的反问题迭代过程如图17所示,边界条件的识别结果如表2所示,基于迁移学习的训练模型损失值更小,迭代收敛速度更快,且精度不发生下降。
![]() 图 16 模型挠度迭代收敛曲线(两边固支两边简支板)Figure 16. The curve of iterative convergence (Simply supported plates with fixed supports on both sides)表 1 矩形薄板边界参数预测结果(两边固支两边简支板)Table 1. Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates with fixed supports on both sides)
图 16 模型挠度迭代收敛曲线(两边固支两边简支板)Figure 16. The curve of iterative convergence (Simply supported plates with fixed supports on both sides)表 1 矩形薄板边界参数预测结果(两边固支两边简支板)Table 1. Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates with fixed supports on both sides)参数及其预测值 对应边界条件 α1=0.0523 x=0边固支 α2=0.9418 x=a边简支 α3=0.0417 y=0边固支 α4=0.9625 y=b边简支 ![]() 图 17 不同网络模型挠度迭代收敛曲线(四边简支板)Figure 17. Iterative convergence curves of different network models (Simply supported plates on four sides)表 2 矩形薄板边界参数预测结果(四边简支板)Table 2. Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates on four sides)
图 17 不同网络模型挠度迭代收敛曲线(四边简支板)Figure 17. Iterative convergence curves of different network models (Simply supported plates on four sides)表 2 矩形薄板边界参数预测结果(四边简支板)Table 2. Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates on four sides)参数及其预测值 对应边界条件 α1=0.9423 x=0边简支 α2=0.9617 x=a边简支 α3=0.9591 y=0边简支 α4=0.9536 y=b边简支 基于迁移学习模型求解四边固支板的反问题迭代收敛过程如图18所示,边界条件的识别结果如表3所示。
![]() 图 18 不同网络模型挠度迭代收敛曲线(四边固支板)Figure 18. Iterative convergence curves of different network models (Four sided fixed support plate)表 3 矩形薄板边界参数预测结果(四边固支板)Table 3. Predicted values of boundary parameters for the thin rectangular plate (Four sided fixed support plate)
图 18 不同网络模型挠度迭代收敛曲线(四边固支板)Figure 18. Iterative convergence curves of different network models (Four sided fixed support plate)表 3 矩形薄板边界参数预测结果(四边固支板)Table 3. Predicted values of boundary parameters for the thin rectangular plate (Four sided fixed support plate)参数及其预测值 对应边界条件 α1=0.0523 x=0边固支 α2=0.0432 x=a边固支 α3=0.0543 y=0边固支 α4=0.0439 y=b边固支 通过收敛情况和计算结果的对比,基于迁移学习求解力学反问题过程中,使用的数据量为原来的四分之一。在满足模型预测精度的要求下,模型的初始损失值减少,模型的收敛速度提高。
4.3 模型能力对比
本文以两边简支两边固支物理信息神经网络为源域模型,基于模型参数迁移方法求解四边简支、四边固支目标域问题。源域模型采用20×20的数据进行训练,基于迁移学习对目标域问题采用10×10的数据进行训练,表4对比两种方法求解力学正问题的结果,可以看出,目标域问题在训练数据样本减少的情况下,训练输出的模型精度不发生下降。表5对比两种方法求解力学反问题的结果,唐明建等[29]采用20×20的数据求解得到两边简支两边固支力学反问题的平均误差为4.93%,迁移学习训练输出的目标域误差在5%以内,模型的预测精度较高且泛化能力较强。
表 4 力学正问题计算误差对比Table 4. Comparison of calculation errors of mechanical forward problems/(%) 学习方法 简支+固支 四边简支 四边固支 非迁移学习 0.2 1.4 0.78 迁移学习 − 1.3 0.13 表 5 力学反问题计算误差对比Table 5. Comparison of calculation errors of mechanical inverse problems/(%) 学习方法 简支+固支 四边简支 四边固支 非迁移学习 4.74
(4.93)[29]4.27 4.34 迁移学习 − 4.58 4.84 5 结论
本文建立了一种基于迁移学习增强的物理驱动深度网络模型,用于解决数据稀疏的力学正反问题。在此基础上利用PINN和迁移学习方法,对不同边界条件的矩形薄板力学正、反问题进行了求解。通过对矩形薄板挠度响应的预测及其边界条件的识别,验证了PINN的有效性和准确性。基于迁移学习构建目标域问题的预测模型,采用少量训练数据求解了四边简支和四边固支矩形薄板的力学正反问题。研究结果对于解决训练数据量不足的实际问题具有重要意义。本文的主要结论如下:
(1)以两边简支、两边固支边界的PINN模型为源域模型,基于迁移学习方法对四边简支、四边固支的目标域问题进行求解。建立的代理模型预测结果与真实值吻合度良好,挠度预测的最大误差绝对值为4.84%,表明PINN模型具有较高的精度,证明了PINN具有构建高精度代理模型的能力。
(2)使用迁移学习将源域的模型参数迁移到目标域的模型,采用源域模型四分之一的数据实现了挠度预测和边界识别。对于四边简支和四边固支的力学问题,训练的数据量大大减少,预测效率提高且精度不下降。这表明模型具有良好的精确性、鲁棒性和泛化能力。对于解决数据收集成本高、数据采集困难的工程问题具有重要意义。
-
![]()
图 3 迁移学习增强的神经网络示意图
Figure 3. The schematic diagram of physical-informed neural network enhanced by transfer learning
![]()
图 4 矩形薄板受均布荷载作用示意图
Figure 4. Schematic diagram of rectangular thin plate under uniformly distributed load
![]()
图 5 力学正问题的网络结构示意图
Figure 5. The schematic diagram of the neural network for solving forward mechanics problems
![]()
图 6 迭代收敛曲线(两边简支+两边固支板)
Figure 6. The curve of iterative convergence (Simply supported plates on both sides and fixed plates on both sides)
![]()
图 7 挠度预测值与精确值对比(两边简支+两边固支板)
Figure 7. A comparison between the predicted value of deflection and its exact value (Simply supported plates on both sides and fixed plates on both sides)
![]()
图 8 误差分布(两边简支+两边固支板)
Figure 8. The distribution of error (Simply supported plates on both sides and fixed plates on both sides)
![]()
图 9 不同网络模型迭代收敛曲线(四边简支板)
Figure 9. Iterative convergence curves of different network models (Simply supported plates on four sides)
![]()
图 10 挠度预测值与精确值对比(四边简支板)
Figure 10. A comparison between the predicted value of deflection and its exact value (Simply s upported plates on four sides)
![]()
图 11 误差分布(四边简支)
Figure 11. The distribution of error (Simply supported plates on four sides)
![]()
图 12 不同网络模型迭代收敛曲线(四边固支板)
Figure 12. Iterative convergence curves of different network models (Four sided fixed support plate)
![]()
图 13 挠度预测值与精确值对比(四边固支板)
Figure 13. A comparison between the predicted value of deflection and its exact value (Four sided fixed support plate)
![]()
图 14 误差分布(四边固支板)
Figure 14. The distribution of error (Four sided fixed support plate)
![]()
图 15 两边简支两边固支薄板示意图
Figure 15. The schematic diagram of simply supported plates with fixed supports on both sides
![]()
图 16 模型挠度迭代收敛曲线(两边固支两边简支板)
Figure 16. The curve of iterative convergence (Simply supported plates with fixed supports on both sides)
![]()
图 17 不同网络模型挠度迭代收敛曲线(四边简支板)
Figure 17. Iterative convergence curves of different network models (Simply supported plates on four sides)
![]()
图 18 不同网络模型挠度迭代收敛曲线(四边固支板)
Figure 18. Iterative convergence curves of different network models (Four sided fixed support plate)
表 1 矩形薄板边界参数预测结果(两边固支两边简支板)
Table 1 Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates with fixed supports on both sides)
参数及其预测值 对应边界条件 α1=0.0523 x=0边固支 α2=0.9418 x=a边简支 α3=0.0417 y=0边固支 α4=0.9625 y=b边简支  下载: 导出CSV
下载: 导出CSV
表 2 矩形薄板边界参数预测结果(四边简支板)
Table 2 Predicted values of boundary parameters for the thin rectangular plate (Simply supported plates on four sides)
参数及其预测值 对应边界条件 α1=0.9423 x=0边简支 α2=0.9617 x=a边简支 α3=0.9591 y=0边简支 α4=0.9536 y=b边简支
下载: 导出CSV
表 3 矩形薄板边界参数预测结果(四边固支板)
Table 3 Predicted values of boundary parameters for the thin rectangular plate (Four sided fixed support plate)
参数及其预测值 对应边界条件 α1=0.0523 x=0边固支 α2=0.0432 x=a边固支 α3=0.0543 y=0边固支 α4=0.0439 y=b边固支
下载: 导出CSV
表 4 力学正问题计算误差对比
Table 4 Comparison of calculation errors of mechanical forward problems
/(%) 学习方法 简支+固支 四边简支 四边固支 非迁移学习 0.2 1.4 0.78 迁移学习 − 1.3 0.13
下载: 导出CSV
-
[1] 孟卓. 冲击动力学反问题及其反演方法综述[J]. 科学技术与工程, 2019, 19(4): 1 − 8. MENG Zhuo. Survey on inverse problem and its inversion methods of impact dynamics [J]. Science Technology and Engineering, 2019, 19(4): 1 − 8. (in Chinese)
[2] 魏培君, 章梓茂. 弹性动力学反问题的数值反演方法[J]. 力学进展, 2001, 31(2): 172 − 180. WEI Peijun, ZHANG Zimao. Numerical methods for inverse problems in elastic dynamics [J]. Advances in Mechanics, 2001, 31(2): 172 − 180. (in Chinese)
[3] 江守燕, 杜成斌, 孙立国. 基于数据驱动的大体积结构裂缝深度反演[J]. 工程力学, 2023, 40(4): 215 − 225. doi: 10.6052/j.issn.1000-4750.2021.10.0780 JIANG Shouyan, DU Chengbin, SUN Liguo. Crack depth detection of massive structures based on data-driven algorithm [J]. Engineering Mechanics, 2023, 40(4): 215 − 225. (in Chinese) doi: 10.6052/j.issn.1000-4750.2021.10.0780
[4] 韩小雷, 冯润平, 季静, 等. 基于深度学习的RC梁集中塑性铰模型参数研究[J]. 工程力学, 2021, 38(11): 160 − 169. doi: 10.6052/j.issn.1000-4750.2020.11.0793 HAN Xiaolei, FENG Runping, JI Jing, et al. Research on parameters of the RC beam lumped plastic hinge model based on deep learning [J]. Engineering Mechanics, 2021, 38(11): 160 − 169. (in Chinese) doi: 10.6052/j.issn.1000-4750.2020.11.0793
[5] 赵林鑫, 江守燕, 杜成斌. 基于SBFEM和机器学习的薄板结构缺陷反演[J]. 工程力学, 2021, 38(6): 36 − 46. doi: 10.6052/j.issn.1000-4750.2020.06.0416 ZHAO Linxin, JIANG Shouyan, DU Chengbin. Flaws detection in thin plate structures based on sbfem and machine learning [J]. Engineering Mechanics, 2021, 38(6): 36 − 46. (in Chinese) doi: 10.6052/j.issn.1000-4750.2020.06.0416
[6] RAISSI M, PERDIKARIS P, KARNIADAKIS G E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations [J]. Journal of Computational Physics, 2019, 378: 686 − 707. doi: 10.1016/j.jcp.2018.10.045
[7] SUN L, GAO H, PAN S, et al. Surrogate modeling for fluid flows based on physics-constrained deep learning without simulation data [J]. Computer Methods in Applied Mechanics and Engineering, 2020, 361: 112732. doi: 10.1016/j.cma.2019.112732
[8] MAO Z, JAGTAP A D, KARNIADAKIS G E. Physics-informed neural networks for high-speed flows [J]. Computer Methods in Applied Mechanics and Engineering, 2020, 360: 112789. doi: 10.1016/j.cma.2019.112789
[9] SHUKLA K, DI LEONI P C, BLACKSHIRE J, et al. Physics-informed neural network for ultrasound nondestructive quantification of surface breaking cracks [J]. Journal of Nondestructive Evaluation, 2020, 39(3): 1 − 20.
[10] 侯龙锋, 朱兵, 张伟. 基于PINN神经网络算法的低雷诺数下槽道流模拟方法[C]. 中国, 厦门: 第三十一届全国水动力学研讨会论文集(上册), 2020: 1037 − 1044. HOU Longfeng, ZHU Bing, ZHANG Wei. A turbulent channel flow modeling method based on the physical informed neural network for low Reynolds number [C]. Xiamen, China: Proceedings of the 31st National Symposium on Hydrodynamics (Volume I), 2020: 1037 − 1044. (in Chinese)
[11] 陆至彬, 瞿景辉, 刘桦, 等. 基于物理信息神经网络的传热过程物理场代理模型的构建[J]. 化工学报, 2021, 72(3): 1496 − 1503. LU Zhibin, QU Jinghui, LIU Hua, et al. Surrogate modeling for physical fields of heat transfer processes based on physics-informed neural network [J]. CIESC Journal, 2021, 72(3): 1496 − 1503. (in Chinese)
[12] RAISSI M, YAZDANI A, KARNIADAKIS G E. Hidden fluid mechanics: Learning velocity and pressure fields from flow visualizations [J]. Science, 2020, 367(6481): 1026 − 1030. doi: 10.1126/science.aaw4741
[13] JAGTAP A D, KHARAZMI E, KARNIADAKIS G E. Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems [J]. Computer Methods in Applied Mechanics and Engineering, 2020, 365: 113028. doi: 10.1016/j.cma.2020.113028
[14] KARNIADAKIS G E, KEVREKIDIS I G, LU L, et al. Physics-informed machine learning [J]. Nature Reviews Physics, 2021, 3(6): 422 − 440. doi: 10.1038/s42254-021-00314-5
[15] LI N, HAO H, GU Q, et al. A transfer learning method for automatic identification of sandstone microscopic images [J]. Computers & Geosciences, 2017, 103: 111 − 121.
[16] PAN S J, YANG Q. A survey on transfer learning [J]. IEEE Transactions on knowledge and data engineering, 2009, 22(10): 1345 − 1359.
[17] CHAKRABORTY S. Transfer learning based multi-fidelity physics informed deep neural network [J]. Journal of Computational Physics, 2021, 426: 109942. doi: 10.1016/j.jcp.2020.109942
[18] HAGHIGHAT E, RAISSI M, MOURE A, et al. A physics-informed deep learning framework for inversion and surrogate modeling in solid mechanics [J]. Computer Methods in Applied Mechanics and Engineering, 2021, 379(7553): 113741.
[19] GAO Y, MOSALAM K M. Deep transfer learning for image‐based structural damage recognition [J]. Computer‐Aided Civil and Infrastructure Engineering, 2018, 33(9): 748 − 768. doi: 10.1111/mice.12363
[20] 洪佳明, 印鉴, 黄云, 等. TrSVM: 一种基于领域相似性的迁移学习算法[J]. 计算机研究与发展, 2011, 48(10): 1823 − 1830. HONG Jiaming, YIN Jian, HUANG Yun, et al. TrSVM: A Transfer Learning Algorithm Using Domain Similarity [J]. Journal of Computer Research and Development, 2011, 48(10): 1823 − 1830. (in Chinese)
[21] ZHUANG F, QI Z, DUAN K, et al. A comprehensive survey on transfer learning [J]. Proceedings of the IEEE, 2020, 109(1): 43 − 76.
[22] TAN C, SUN F, KONG T, et al. A survey on deep transfer learning [C]. Rhodes, GREECE: International Conference on Artificial Neural Networks, 2018: 270 − 279.
[23] ZHANG J, LI W, OGUNBONA P. Joint geometrical and statistical alignment for visual domain adaptation [C]. Honolulu, HI: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 1859 − 1867.
[24] TAN B, ZHANG Y, PAN S, et al. Distant domain transfer learning [C]. San Francisco, CA: Proceedings of the AAAI Conference on Artificial Intelligence, 2017: 2604 − 2610.
[25] MIHALKOVA L, HUYNH T, MOONEY R J. Mapping and revising Markov logic networks for transfer learning [C]. British Columbia, Canada: Proceedings of the Twenty-Second AAAI Conference on Artificial Intelligence, 2007, 7: 608 − 614.
[26] YOSINSKI J, CLUNE J, BENGIO Y, et al. How transferable are features in deep neural networks? [C]. Montreal, CANADA: 28th Conference on Neural Information Processing Systems (NIPS), 2014, 4: 3320 − 3328.
[27] JIANG M, HUANG Z, QIU L, et al. Transfer learning-based dynamic multiobjective optimization algorithms [J]. IEEE Transactions on Evolutionary Computation, 2017, 22(4): 501 − 514.
[28] 徐芝纶. 弹性力学简明教程[M]. 北京: 高等教育出版社, 2013. XU Zhilun. A brief course on Elasticity [M]. Beijing: Higher Education Press, 2013. (in Chinese)
[29] 唐明健, 唐和生. 基于物理信息的深度学习求解矩形薄板力学正反问题[J]. 计算力学学报, 2022, 39(1): 120 − 128. TANG Mingjian, TANG Hesheng. A physics-informed deep learning method for solving forward and inverse mechanics problems of thin rectangular plates [J]. Chinese Journal of Computational Mechanics, 2022, 39(1): 120 − 128. (in Chinese)




计量
- 文章访问数: 1085
- HTML全文浏览量: 302
- PDF下载量: 310
